Contrairement au logiciel RobotProg il n'y a pas de commande avancer, reculer, tourner a droite, ..., etc.
Les moteurs sont commandés en activant les sorties sur lesquelles ils sont branchés. Si vous ne désactiver pas les sorties, ils continuent de tourner.
De même il n'y a pas de detection type "MurEnFace". Il y a des capteurs qui, si ils sont activés envoie un signal 1 au microcontroleur Picaxe. Si il n'est pas activé alors le signal est égal à 0.
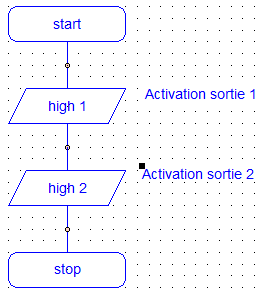
On va activer les sorties 1 et 2 à l'aide de la commande "high".
Remarques :
Si les moteurs sont branchés sur la sortie 1 et la sortie 2 alors le robot avance. Les deux moteurs sont en marche, ils ne s'arrêtent pas. L'instruction "End" signifie que le programme est fini et non que les moteurs doivent s'arrêter.
On ne peut pas savoir si la sortie 1 correspond au moteur droit ou gauche. Il faut faire un essai (activer la sortie 1 et voir quel moteur tourne)
Pour désactiver une sortie on utilise la commande "low"
Pour introduire un temps de fonctionnement on utilise la commande "pause" . Le temps est exprimé en milliseconde (3000 ms = 3 s)
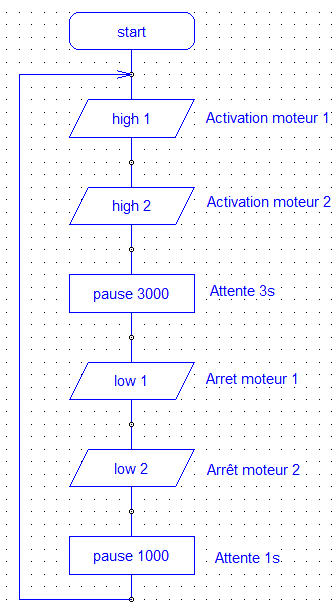
Le robot avance pendant 3 secondes, s'arrête 1 seconde, redémarre 3secondes et ainsi de suite.
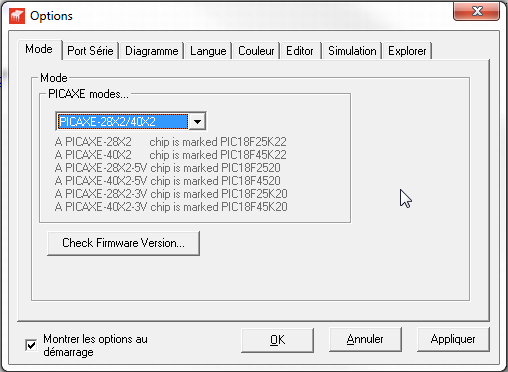
Double-clique sur l'icone "PICAXE Programming Editor" ![]()
La fenêtre du logiciel s'ouvre, sur la boîte de dialogue "Options"
C'est le même principe que dans RobotProg, mais les les symbole sont un peu différent et ne porte pas le même nom.
Permettent d'agir sur les sorties (moteurs par exemple).
Cliquez sur l'icône "out" ![]()
Remarque :
Le champ de saisie situé en bas à gauche de l’écran permet de sélectionner la sortie à activer.
Lorsque cette commande est exécutée, la sortie concernée reste active en permanence jusqu’à temps qu’une autre commande ne modifie son état.
Permettent de tester les entrées (capteurs par exemple)
Cliquez sur l'icône "if" ![]()
![]() Permettent d’effectuer un test sur une seule broche du Picaxe, sorties "Yes" ou No" à droite ou à gauche pour simplifier les organigrammes en évitant de nombreux croisements.
Permettent d’effectuer un test sur une seule broche du Picaxe, sorties "Yes" ou No" à droite ou à gauche pour simplifier les organigrammes en évitant de nombreux croisements.
Remarque :
Le champ de saisie situé en bas à gauche de l’écran permet de sélectionner l'entrée à tester.
Ces commandes permettent d’accéder aux instructions d’attente. En effet, le fonctionnement d’un Picaxe est très rapide (à l’échelle humaine) et il est souvent indispensable de ralentir le programme pour visualiser les évènements.
Cliquez sur l'icône ![]()
Remarque :
Le champ de saisie situé en bas à gauche de l’écran permet de modifier le temps d'attente.
Ce groupe de commandes permet d’accéder aux instructions nécessaires à la mise en œuvre de sous-programme.
Les sous-programmes s'écrivent directement à coté de l'organigramme principal.
Cliquez sur l'icône "sub" ![]()
![]() : Permet de dessiner des lignes pour relier les blocs.
: Permet de dessiner des lignes pour relier les blocs.
Approcher la souris du bloc de départ, un cercle rouge apparaît, cliquer avec le bouton gauche, s’approcher du bloc de destination, un cercle rouge apparaît, cliquer de nouveau pour établir la liaison.
Cliquer sur une liaison pour l’effacer.
Note : le menu Options / Diagramme permet de sélectionner l’option « Rester en mode tracé de ligne » afin de maintenir l’activation de cet outil.
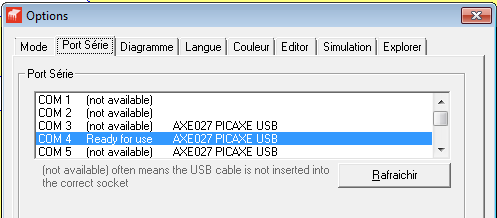 Si le câble USB AXE027 est relié et que le pilote est correctement installé, l’affichage devient « Ready for use ». Si ce n'est pas fait, sélectionnez la ligne marquée "Ready for use".
Si le câble USB AXE027 est relié et que le pilote est correctement installé, l’affichage devient « Ready for use ». Si ce n'est pas fait, sélectionnez la ligne marquée "Ready for use".Les moteurs et la conception du robot font que celui-ci ne se déplace pas forcément en ligne droite lorsque les deux moteurs sont activés simultanément. On peut corriger ces imperfections en agissant sur les ajustables AJ1 et AJ2.
|
|
