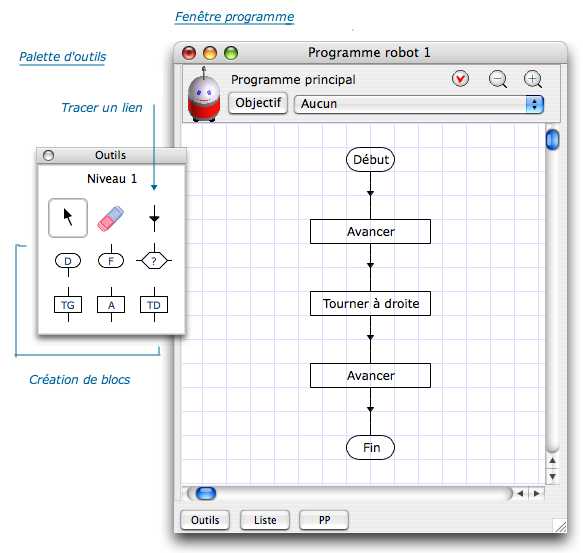
Lancer RobotProg : vous voyez deux fenêtres affichées : la fenêtre de programme où vous allez dessiner l'organigramme du programme et une palette contenant les outils permettant de construire l'organigramme.
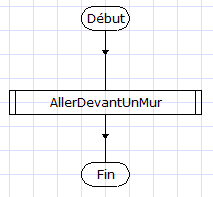
Construisez l'organigramme représenté ci-dessous :
Choisissez le menu Fenêtre > Exécution
Le terrain apparaît dans une autre fenêtre avec des boutons en haut permettant de contrôler l'exécution. 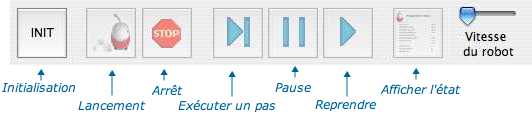
Pour déplacer le robot, vous disposez de trois commandes : Avancer, Tourner à droite, Tourner à gauche.
Ces commandes sont écrites dans des blocs de forme rectangulaire disponibles dans la palette d'outils.
* La commande Avancer ![]() fait avancer le robot d'une case devant lui. Attention, si le robot est en face d'un mur quand cette commande est exécutée, il s'écrase contre le mur, c'est une erreur d'exécution, le programme s'arrête.
fait avancer le robot d'une case devant lui. Attention, si le robot est en face d'un mur quand cette commande est exécutée, il s'écrase contre le mur, c'est une erreur d'exécution, le programme s'arrête.
*Les commandes Tourner à droite ![]() et Tourner à gauche
et Tourner à gauche ![]() font faire un quart de tour au robot vers sa droite ou sa gauche. Le robot reste dans la même case.
font faire un quart de tour au robot vers sa droite ou sa gauche. Le robot reste dans la même case.
Fermez le programme précédent et choisissez le menu Fichier > Nouveau programme.
Ecrire un programme faisant faire un demi-tour au robot. Exécuter ce programme.
Remarques :
- Pour faire un demi-tour, il suffit de tourner deux fois de suite à droite ou à gauche.
- Dans la fenêtre programme, vous pouvez sélectionner l'objectif Faire un demi-tour. A la fin de l'éxécution, RobotProg vérifiera si l'objectif a été atteint.
Fermez le programme précédent et choisissez le menu Fichier > Nouveau programme.
Ici vous allez construire un programme permettant d'aller jusqu'à un mur.
Choisissez l'objectif Aller devant un mur.
* Programme contenant un test :
La condition logique contenue dans le bloc test ![]() est évaluée quand le bloc est exécuté. Le résultat peut être vrai ou faux. Si le résultat est vrai, l'exécution se poursuit après la sortie marquée O (oui ou vrai) ; si le résultat est faux, l'exécution se poursuit après la sortie marqué N (non ou faux) Dans l'exemple ci-dessous, la condition logique est MurEnFace, c'est un mot-clef du langage du robot qui fournit un résultat de type logique (vrai ou faux) en fonction de la position du robot au moment où elle est évaluée Si le robot est en face d'un mur, le programme s'arrêtera, sinon le robot avancera et recommencera le test.
est évaluée quand le bloc est exécuté. Le résultat peut être vrai ou faux. Si le résultat est vrai, l'exécution se poursuit après la sortie marquée O (oui ou vrai) ; si le résultat est faux, l'exécution se poursuit après la sortie marqué N (non ou faux) Dans l'exemple ci-dessous, la condition logique est MurEnFace, c'est un mot-clef du langage du robot qui fournit un résultat de type logique (vrai ou faux) en fonction de la position du robot au moment où elle est évaluée Si le robot est en face d'un mur, le programme s'arrêtera, sinon le robot avancera et recommencera le test.
Pour résoudre les différents problème, le mieux est de les écrire avec une séquence logique de type
Construisez l'organigramme représenté ci-dessous et lancez son exécution. 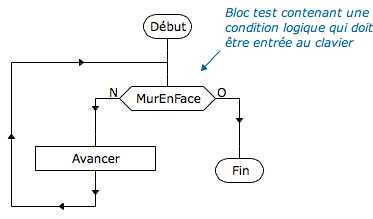
Note :
Vous allez modifier le diagramme que vous venez de réaliser pour essayer de réaliser l'objectif "Aller dans un coin"
N'oubliez d'enregistrer votre programme de temps en temps, cela ne sera jamais rappelé. Et parfois RobotProg plante !
La méthode pour aller dans un coin peut être la suivante : le robot va d'abord devant un mur, puis il tourne pour longer le mur, jusqu'à ce qu'il arrive en face d'un autre mur, il est donc dans un coin. Pour cela le robot exécutera cette séquence logique :
Modifiez l'organigramme précédent pour que le robot exécute la séance logique ci-dessus.
Dans l'organnigramme que vous venez de dessiner, vous pouvez vous apercevoir que vous utilisez 2 fois le même ensemble de commande. Au lieu de dessinner un grand organigramme vous allez le scinder en 2 en créant un sous-programme
Les sous-programmes sont disponibles à partir du niveau 2. Le niveau est affiché dans la palette d'outil. Si vous êtes au niveau 1, passez au niveau 2 en utilisant le menu Configuration > Niveau.
Pour créer un sous-programme, choisissez le menu Programmation > Nouveau sous-programme.
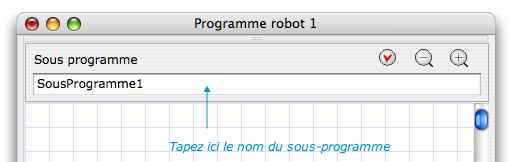
Redessinez l'organigramme suivant dans la fenêtre du sous programme
Pour aller dans un coin, il suffit de modifier ce programme principal.
Enregistrer
Problème : Déplacer le robot derrière le mur central et relancer votre programme. Que se passe-t-il ? 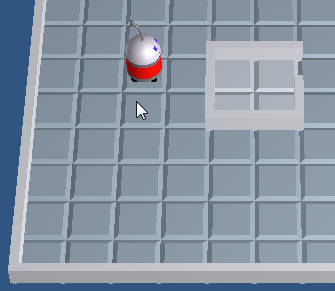
Il ne va plus dans un coin, mais s'arrête dans un mur : pourquoi ?
Il faut modifier votre programme pour que le robot teste qu'il est bien dans un coin (c'est à dire avec un mur devant et un mur à sa droite ou à sa gauche).
Choisissez l'objectif "Aller dans un coin"
* Conditions logiques
Une condition logique est une expression donnant un résultat vrai ou faux. On peut en particulier combiner différents mots-clef avec des opérateurs logiques tels que Et, Ou, Non. Exemple : MurEnFace Et MurADroite
Vous trouverez une description détaillée dans la documentation, chapitre : langage du robot, rubriques fonctions prédéfinies et expressions. La documentation s'affiche avec le menu Aide > Documentation
Pour tester si le robot vient d'arriver dans un coin, il faut modifier le programme principal en testant la condition logique :
MurADroite Ou MurAgauche
Pour tester votre diagramme dans de bonne condition, vous allez changer de terrain.
Il faut que le robot aille dans un coin malgrès les obstacles et quelque soit sa position ou son orientation.
Enregistrez ce diagramme
Vérifie que tu es toujours indentifié. Vas dans la page d'accueil du cours Techno_3ème, et en haut à droite tu dois retrouver cet onglet bleu :![]() avec ton nom écrit. Si ce n'est pas le cas retourne à la page d'accueil de Chamilo et réindentifie-toi.
avec ton nom écrit. Si ce n'est pas le cas retourne à la page d'accueil de Chamilo et réindentifie-toi.
|
|
