
Fermez la fenêtre de programmation ouverte. Elle correspond à l'écriture des programmes en Basic que nous n'utiliserons pas. Nos programmes seront écrits avec des organnigrammes ou en anglais : Flowchart.
C'est le même principe que dans RobotProg, mais les symboles sont un peu différents et ne portent pas le même nom.
On ne peut pas savoir si les fils rouge et noir des moteurs sont branchés dans le bon sens. Vous allez donc dans un premier temps tester les sens de rotation des moteurs avec les commandes out.
Dessinez ce diagramme 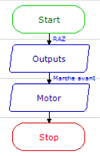 en suivant les instructions ci-dessous :
en suivant les instructions ci-dessous :


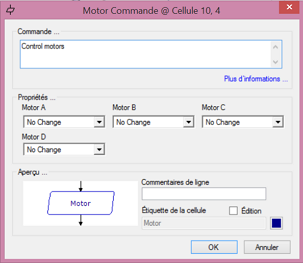
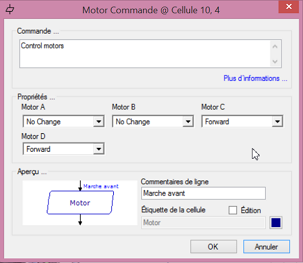
Attention : Sur notre robot, seuls les moteurs C et D sont actifs
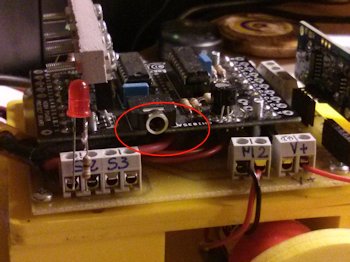
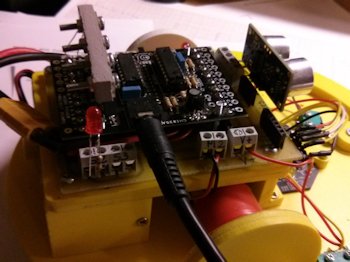
Avant toute manipulation sur le robot il faut le poser sur une cale pour que les roues ne touchent pas la table. Un programme peut être chargé en mémoire et faire tourner les roues à la mise sous tension. 

Pour faire avancer et manoeuvrer le robot, il faut connaître les différentes commandes à appliquer aux moteurs.
Pour cela vous allez construire et remplir des tableaux de référence qui vous permettront d'appliquer efficacement la bonne commande au bon moment.
Sur le robot
Suivant le niveau (high - low ou 1 - 0) appliqué au 2 sorties d'un moteur, il va tourner dans un sens ou dans l'autre.
Vous pouvez effacer le précedent. 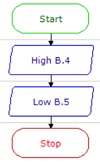
Remplir le tableau R4 en entourant la bonne option :
| M1 | B4 | high | Avant |
B4 | low | Avant Arrière Arrêt |
B4 | low | Avant Arrière Arrêt |
B4 | high | Combinaison Interdite |
| B5 | low | B5 | high | B5 | low | B5 | high | |||||
| M2 | B6 | high | Avant Arrière Arrêt |
B6 | low | Avant Arrière Arrêt |
B6 | low | Avant Arrière Arrêt |
B6 | high | Combinaison Interdite |
| B7 | low | B7 | high | B7 | low | B7 | high |
En déduire les tableaux d'actions suivants en remplissant les cases vides avec high ou low :
| Avancer | Reculer | Arrêter | |||||
| B4 | B4 | B4 | |||||
| B5 | B5 | B5 | |||||
| B6 | B6 | B6 | |||||
| B7 | B7 | B7 | |||||
Pour tourner à droite ou à gauche il y a 2 possibilités : soit bloquer une roue et faire tourner l'autre en avant pour faire un grand virage autour de la roue bloquée, soit faire tourner une roue en avant et l'autre en arrière pour faire un petit virage sur place. Remplissez les tableaux de R4 en notant dans les cases vides high ou low :
| Tourner Droite | Tourner Gauche | |||||
| Grand | Petit | Grand | Petit | |||
| B4 | B4 | |||||
| B5 | B5 | |||||
| B6 | B6 | |||||
| B7 | B7 | |||||
Testez les différentes combinaisons en utilisant l'organigramme ci-contre : 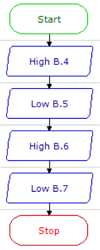
N'oubliez pas que vous ne pouvez pas utiliser la combinaison high5-high4 ou high7-high6 (court-circuit au niveau des moteurs.
Transférez les organigrammes sur le robot et testez-les le robot sur la cale et par terre
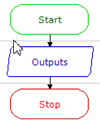
Pour raccourcir les diagrammes il existe d'autres types de commande
Attention : les sorties 0 - 1 - 2 - 3 ne concernent pas les moteurs. Vous n'avez donc pas à les cocher. Ces sorties seront utilisées pour d'autres applications
Avancer |
Reculer |
Arréter |
Interdit : ne pas utiliser ; court circuit |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| let pins = | let pins = | let pins = | let pins = 48 | let pins = 192 | let pins = 240 | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Tourner Droite |
Tourner Gauche |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Petit : let pins = | Grand : let pins = | Petit : let pins = | Grand : let pins = | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
La commande let pins = vous permettra d'utiliser en même temps les 4 autres sorties (pour allumer une DEL par exemple)
Si vous avez correctement réglé le sens de rotation des roues du robot vous pouvez aussi utiliser les commandes movement ![]() . Elles permettent en utilisant une seule
. Elles permettent en utilisant une seule![]() commande d'avancer (forward), reculer (back), tourner à droite (right), à gauche (left) et de s'arrêter (halt).
commande d'avancer (forward), reculer (back), tourner à droite (right), à gauche (left) et de s'arrêter (halt).
Ces commandes correspondent exactement à la même utilisation que pins. Par exemple forward correspond exactement à let pins = 160
La commande est plus parlante, mais elle ne permet pas d'utiliser une autre sortie en même temps.
Il est temps de passer à vos premiers programmes et de faire circuler le robot.
|
|
