

Ce sont des interrupteurs. Lorsque l'on appuie sur le levier, un contact s'établi entre les 2 pattes avant du capteur. Lorsque l'on relache le levier, le contact se relache.
Remarques :
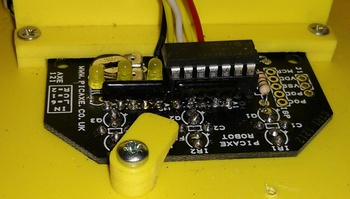
Sur le devant du robot, se trouve d'autres bornier de connexion. Ceux-ci vont servir aux "Entrées". Sur ces éntrées vont pouvoir se brancher des "capteurs" qui pourront donner des ordres pour exécuter certaines actions automatiquement.
En cas de besoin une page présentant les différentes commande est disponible ici
Il existe pour les controleur "Picaxe" différents capteurs : capteur de fin de course, capteur de distance à ultrason, capteur de lignes, thermomètre digital, recepteurs infrarouge, ......
Dans un premier temps, tu vas utiliser les capteurs dits "de fin de course" qui sont les les capteurs les plus simples. Ce sera aussi l'occasion de se servir des sorties autres que les moteurs.
Présentation :
Ce sont des interrupteurs. Lorsque l'on appuie sur le levier, un contact s'établi entre les 2 pattes avant du capteur. Lorsque l'on relache le levier, le contact se relache.
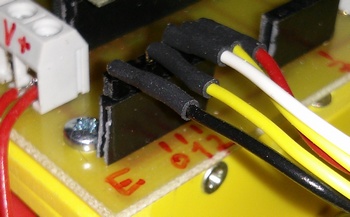
Branchement : ![]()
Le fil rouge se branche sur V+. Le fil de couleur (jaune, noir, blanc) se branche sur une des entrées à l'avant du robot notée 0 - 1 - 2 - 5 - 6 -7. Les deux entrées notées 3 et 4 ne sont pas utilisables.

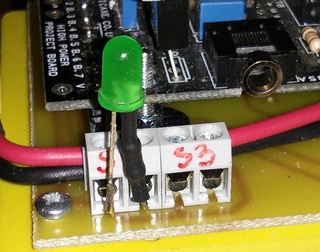
Connecter la DEL rouge à gauche sur la sortie S0 et la verte à droite sur la sortie S2. Ne jamais détordre et retordre les pattes. Les parties gainées de plastique noir sont à placer en avant (voir ci-dessous)
Pour l'instant, les capteurs ne sont pas fixés. Cette partie se fera plus tard, et fera partie de votre travail de conception à faire !
Les fils rouge sont à branchés sur la prise V+ à l'avant droit du robot voir ci-dessous 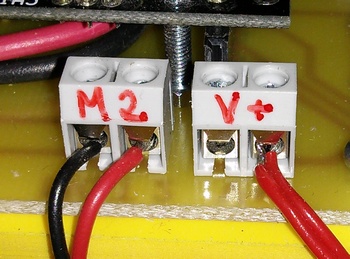
Les fils de couleur se branche au sorties 5 - 6 - 7 à l'avant du robot. Les couleurs des fils ne sont pas obligatoirement positionnées comme ci-cessous.
Pour utiliser les capteurs, tu vas tester la présence ou non d'une information sur l'entrée correspondante. Selon le résultat de ce test une sortie (ou plusieurs) sera activée.
Les test utilise les commandes "if" ![]() :
: ![]() . la différence entre les 4 se situe juste dans la position des réponses Yes ou No.
. la différence entre les 4 se situe juste dans la position des réponses Yes ou No.
Il faut allumer la DEL verte quand on appuie sur le capteur droit
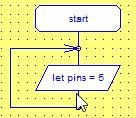
Le programme doit avoir cette séquence logique :
L'organigramme doit avoir cette structure : 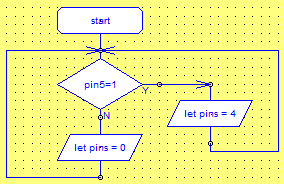
Il faut allumer en plus la DEL rouge quand on appuie sur le capteur gauche.
Séquence logique :
L'organigramme doit avoir cette structure : 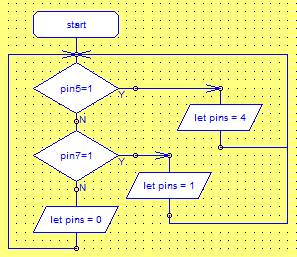
A toi de faire !
Il faut que tu modifie le programme précédent pour que :
Challenge :
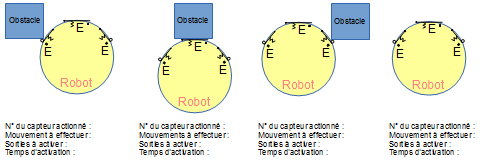
Il faut maintenat que le robot avance et détecte si il rencontre (à droite, à gauche, ou devant) un obstacle. Il faudra en cas d'obstacle : allumer la DEL comme précédemment et modifier la trajectoire du robot pour qu'il évite l'obstacle.
Pour cela i l faudra résoudre 2 problèmes :
Vérifie que tu es toujours indentifié. Vas dans la page d'accueil du cours Techno_3ème, et en haut à droite tu dois retrouver cet onglet bleu :![]() avec ton nom écrit. Si ce n'est pas le cas retourne à la page d'accueil de Chamilo et réindentifie-toi.
avec ton nom écrit. Si ce n'est pas le cas retourne à la page d'accueil de Chamilo et réindentifie-toi.
Ce capteur permet de mesurer la distance en cm d'un obstacle.
L'un des 2 cylindres émet un signal en l'ultrason, lorsque ce signal rencontre un objet, il retourne vers l'appareil, l'autre cylindre capte le signal en retour et mesure le temps mis pour faire l'aller et retour. Ce temps est converti en distance.
Branche le capteur sur la prise du centre. Il est opérationnel. Seule contrainte : la sortie 3 est utilisée pour émettre les ultrasons. Tu ne pourra donc pas utiliser cette sortie pour un autre actionneur.
C'est la commande ultra ![]() de la barre d'outil "Movement"
de la barre d'outil "Movement" ![]() qui permet d'utiliser le capteur. Cette commande stocke la distance dans une variable (b0 par exemple). On compare la valeur de cette variable
qui permet d'utiliser le capteur. Cette commande stocke la distance dans une variable (b0 par exemple). On compare la valeur de cette variable ![]() avec la distance voulue.
avec la distance voulue.
Dessine le programme ci-dessous. 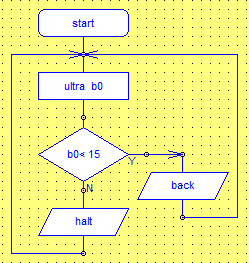
On peut donc utiliser ce capteur à ultrason à la place du contact fin de course du centre.
Ce capteur est composé de 3 capteurs différents. va . Chacun des 3 capteurs qui le composent, permet de détecter une différence de couleur entre le blanc et le noir. Si une ligne est tracé au sol, le robot va pouvoir la suivre.
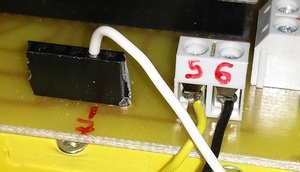
Fixe avec 2 vis la réglette de détection de ligne ainsi que le petit loquet (voir photo ci-dessous).

Place le capteur et vérouille-le
Branche les fiches sur la prise de gauche.
 C'est la partie avant de la plaque où sont positionnés les trois capteurs : droit, centre, gauche. Si tu retournes le robot les capteurs sont visibles
C'est la partie avant de la plaque où sont positionnés les trois capteurs : droit, centre, gauche. Si tu retournes le robot les capteurs sont visibles
Pour tester les capteurs, il faut prendre une feuille blanche et tracer dessus un gros trait bien noir de 10 mm de large au bord de la feuille.
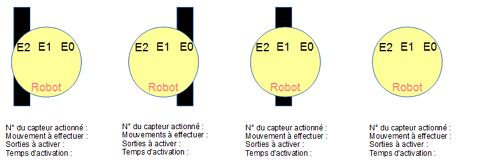
Il faut que le robot suive la ligne noire tracé sur le circuit.
Réalise un petit croquis sur lequel tu représenteras les capteurs et les mouvements à réaliser (dessine une flêche) pour retrouver la ligne noire au centre (E1) et enfin les sorties à activer (n'oublie pas les DEL) et le temps qu'elles doivent rester actives.
|
|
